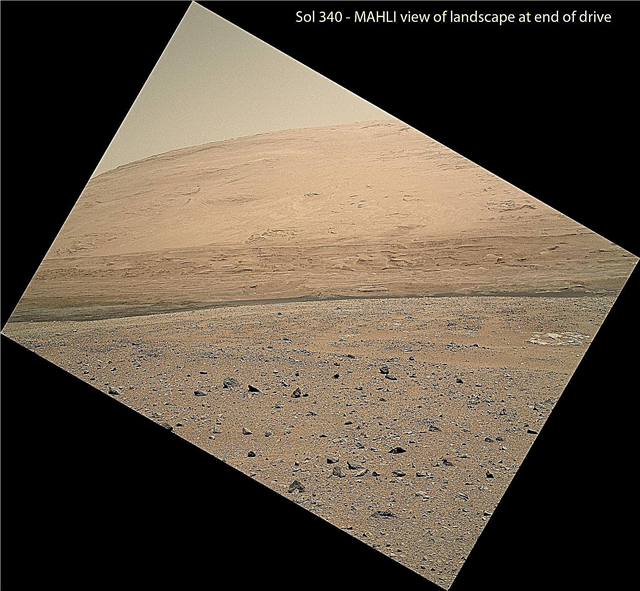
Ova scena snimljena je na Sol 340 ubrzo nakon što je Curiosity završio svoj najduži pogon još
Pogon od 329,1 stopa (100,3 metra) bio je dvostruko duži nego kod svih zanimljivih prethodnih solističkih pogona tvrtke Curiosity. Mars kamera sa objektivom (MAHLI) na NASA-inom Curiosity roveru nalazi se pod kutom kada je ruka rovera spremljena za vožnju. Ipak, kamera je u stanju snimiti poglede na teren koji Curiosity prelazi u Gale Crateru, a rotiranje slike za 150 stupnjeva pruža ovu scenu s desne strane. Zasluge: NASA / JPL-Caltech / MSSS
Pogledajte ažuriranu kartu za poravnanje ispod [/ opis]
NASA-in automobil marke veličine Curiosity sada plamti površinom Crvenog planeta i kreće se rekordno brzim korakom prema uzdišanoj marsovskoj planini koja je napunjena mineralnim spremištima koji bi potencijalno mogli podržati životnu okolinu.
U nedjelju, 21. srpnja (ili Sol 340), Curiosity je vozio duljinu nogometnog igrališta - 109,7 metara (100,3 metra) - raspon koji je dvostruko više nego ikad prije nego što je dramatično udario na Mars prije gotovo godinu dana ,
Prethodni rekord jednodnevne vožnje bio je približno pola nogometnog igrališta - 54 metra (49 metara) - i postignut je na Sol 50 (26. rujna 2012.), otprilike sedam tjedana nakon što je puls udario u Gale Crater, kolovoza. 6, 2012.
Robot sa 6 kotača uspio se pomaknuti toliko daleko, jer se prilikom prethodne vožnje zavrtio na usponu nudeći neobično dobar pogled na okolni krajolik i cestu ispred poda kratera prema Mount Sharp - krajnji cilj vožnje.

"Ono što nam je omogućilo da se vozimo do sada na Sol 340, počelo je s velike točke, a također smo imali i Mastcam slike koje nam daju veličinu stijena kako bismo mogli biti sigurni da nisu opasnosti", rekao je planetar rover Paolo Bellutta iz NASA-inog laboratorija za mlazni pogon, Pasadena, Kalifornija, u izjavi NASA-e.
"Mogli smo vidjeti na daljinu, ali ispred je bilo područje koje nije bilo jasno vidljivo, pa smo morali pronaći stazu oko toga područja."
Nakon još jedne dugotrajne vožnje od 68,2 jarda (62,4 metra) u srijedu, 23. srpnja (Sol 342), ukupna vozna udaljenost misije do sada je 0,81 milju (1,23 kilometra).
Mount Sharp leži oko 8 milja (8 kilometara) - dok leti marsovska vrana.
4. srpnja, Curiosity se upustio u epski hod na Mount Sharp nakon što je završio više od sedam mjeseci naučnih istraga i povijesnog međuplanetarnog bušenja i analiza uzoraka na području poznatom kao zaljev Glenelg i Yellowknife. Tamo je otkrila okruženje stanovanja s kemijskim sastojcima koji bi mogli izdržati marsovske mikrobe - čime je već postigla osnovni cilj NASA-ine vodeće misije na Mars.
Kombinacija poboljšanog iskustva inženjera koji upravljaju mega roverom, kao i međuvremene nadogradnje softvera, također igraju ključnu ulogu u ubrzavanju radoznalosti prema 5,5 km visokoj planini Sharp.
Veliki skok u vožnji po Marsu uskoro se koristi novim programom za vožnju nazvanim autonomna navigacija ili autonav koji će ubrzati kopneno putovanje.
"Stavili smo novi softver - nazvan autonav ili autonomna navigacija - na vozilo odmah nakon razdoblja spajanja, u ožujku 2013.", rekao je Jim Erickson, voditelj projekta Curiosity, u ekskluzivnom intervjuu za Space Magazine. Erickson je iz NASA-inog laboratorija za mlazni pogon (JPL) u Pasadeni, Kalifornija.
"To će povećati našu sposobnost vožnje."

Primjena novog vozačkog softvera učinit će Curiosity pametnijim, sposobnijim, produktivnijim i neovisnijim nego ikad prije.
"S autonavom rover će moći razumjeti koliko vozi, neovisno o tome je li njegovo klizanje ili ne i poboljšava sigurnost", rekao mi je Erickson.
Roverova ruta kreće se prema jugozapadu, prema drevnim sedimentnim slojevima u podnožju planine, usred Gale Cratera.
Osim postavljanja novih rekorda vožnje, rover od 1 tone vozi se i češće, a također i tijekom više dana.
Kad se sve sinkronizira, Curiosity može voziti dva ili više dana zaredom.
"Sada možemo voziti dva dana zaredom ako je vrijeme točno. Ako smo dobili rezultate dnevne vožnje (n) na vrijeme prije nego što planiramo vožnju za sljedeći dan (n + 1) - gotovo kao da ste na Marsovom vremenu. Tada bi to moglo uspjeti ", objasnio je Erickson.
"Također, kad dobijemo mogućnost autonava, možemo planirati dva dana zaredom. Jedan dan usmjerene vožnje, a drugi dan može biti "U redu, ovo je vaš cilj odakle god završite, pokušajte i idite na ovo mjesto". "
"To će povećati produktivnost!"
Erickson kaže da tim sada testira autonav i treba li biti gotov u roku od nekoliko tjedana ili prije.
Pročitajte 1. i 2. dio mog intervjua s Jimom Ericksonom za daljnje pojedinosti.

U međuvremenu, Curiosity stariji rover sestre Opportunity kreće brzim putem prema svom planinskom cilju i trebao bi stići u bazu Solander Pointa uskoro u kolovozu.
Solander Point je segment erodiranog obruča ogromnog kratera Endeavour, a može imati i ključne sastojke koji su bitni za podršku okolišu pogodnom za moguće marsovske mikrobe.
I vrijedno je napomenuti da stariji modeli sis Opportunity još uvijek drže svjetski rekord marsovske vožnje u daljini od 219,89 metara - uspostavljen prije više od 8 godina na Solu 410 (20. ožujka 2005.) !!
Pratite više informacija o NASA-inom paru marsovskih robota.