Dok je NASA-in rotor Curiosity Mars od 1 tone krenuo svojim epskim putovanjem do drevnih sedimentnih slojeva u podnožju misteriozne planine Sharp, Space Magazine je obavio ekskluzivni intervju s rukovodiocem Projekta znatiželje Jimom Ericksonom, iz NASA-inog laboratorija za mlazni pogon (JPL) kako bi dobio najnovija lopata da tako kažemo o robotima izvanzemaljskih avantura.
Znanstveni i inženjerski timovi marljivo rade na tome da ubrzaju rovare otprilike godinu dana na Marsovskoj planini visokoj 3,4 milje (5,5 km) - što je glavno odredište misije, a u njemu se nalaze spremnici minerala koji su ključni za stvaranje iskre i održavanje života.
"Pošli smo od Glenelga i Shaler-ovog izdvajanja i krenuli prema Mount Sharp", rekao mi je Erickson.
Sveukupno, rover sa šest kotača tek je prekoračio oznaku 1 kilometar u vožnji kroz Crvenu planetu.
Mount Sharp leži oko 8 milja (8 kilometara) - dok leti marsovska vrana.

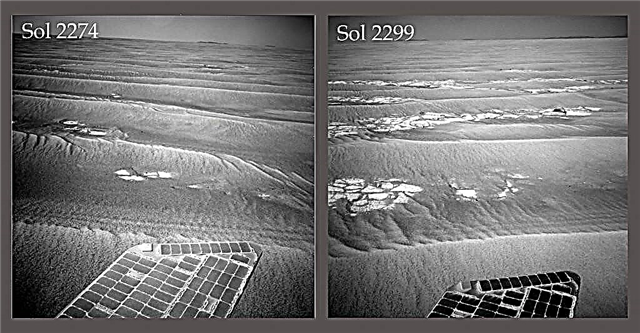
Znatiželja će morati preći preko potencijalno izdajničkih polja dina na dugom putu prema slojevitom planinu.
"Stvari idu vrlo dobro i imamo nekoliko pogona ispod pojasa", rekao je Erickson.
Znatiželja je upravo upotpunila više od pola godine bogatu znanost u zaljevima Glenelg i Yellowknife gdje je otkrila nastanjivo okruženje na Crvenoj planeti s kemijskim sastojcima koji mogu izdržati marsovske mikrobe - čime je već postigla osnovni cilj NASA-ine vodeće misije na Mars.
Curiosityovi rukovodioci nadograđuju mozak rovera novim softverom za vožnju, čineći je pametnijom, produktivnijom i sposobnijom nego ikad prije, a također i daleko neovisnijom od njezina zadivljujućeg susreta u Gale Crateru prije gotovo godinu dana, 6. kolovoza 2012.
„I dalje vozimo redovito. Sljedeća vožnja planirana je za sutra i izvršava se sutradan. "
Od danas (Sol 336, 17. srpnja), Curiosity je vozio šest puta otkako je 4. srpnja napustio Glenelg (Sol 324), ukupne više od 180 metara.

Znanstvenici su posebno usmjerili znatiželju na Gale Crater i Mount Sharp jer je nabijen naslagama minerala od gline koji se stvaraju u neutralnoj vodi i koji bi mogli podržavati nastanak i razvoj jednostavnih marsovskih životnih oblika, prošlih ili sadašnjih.
Erickson je radio na ključnim položajima u mnogim NASA-inim planetarnim znanstvenim misijama iz Vikinga. Tu se ubraja misija Galileo na Jupiter, oba MER-ova rovera Spirit & Opportunity, kao i posjeta Mars Reconnaissance Orbiter-u (MRO).
Evo prvog dijela mog širokog razgovora s Jimom Ericksonom, voditeljem projekta JPL Curiosity. Slijedi drugi dio.
Zamolio sam Ericksona da opiše novi softver za vožnju zvan autonomna navigacija ili autonav i kako će pomoći ubrzati radoznalost na njenom putu. Do sada su inženjeri na Zemlji radili većinu planiranja za nju.
Jim Erickson: Stavili smo novi softver - nazvan autonav ili autonomna navigacija - na vozilo odmah nakon razdoblja spajanja, u ožujku 2013. To će povećati našu sposobnost vožnje.
Razlog zašto smo ga ugradili je taj što smo znali da će biti korisno kada krenemo na dugu vožnju do Mount Sharp-a. A mi svrabamo da to provjerimo. Sljedećih nekoliko tjedana ćemo raditi razne testove s autonomašima.
Ken Kremer: Kako će autonav pomoći znatiželji?
Jim Erickson: Rover će moći razumjeti koliko vozi, neovisno o tome je li klizanje ili ne i poboljšati sigurnost.
I tada će na snazi biti sljedeći korak koji će omogućiti roveru da vozi sam.
Ken: Koliko često će se znatiželjnost voziti?
Jim Erickson: Negdje kao svaki drugi dan. Planiramo vožnju, vidimo kako ide i je li prošlo dobro, a zatim prelazimo dalje na sljedeću vožnju. To provodimo u ovom trenutku dok radimo provjere autonava.
Možda ćemo morati zaustaviti vožnju za dio autonoma, koji bi trebao obaviti testiranje.
U osnovi smo ograničeni uglavnom količinom dana uspješno završili vožnju prethodnog dana. I imamo li podatke vraćene dolje [na Zemlju] kako bismo mogli planirati vožnju za sljedeći dan.
U nekim se okolnostima vrijeme Marsa može okretati tako da ne dobijemo podatke na vrijeme, tako da nećemo voziti taj dan.
Ken: Možete li ikad voziti dva dana zaredom?
Jim Erickson: Da, možemo ako je točno vrijeme. Ako smo dobili rezultate dnevne vožnje (n) na vrijeme prije nego što planiramo vožnju za sljedeći dan (n + 1) - gotovo kao da ste na Marsovom vremenu. Tada bi to u redu.
Također, kada dobijemo mogućnost autonava, možemo planirati dva dana zaredom. Jedan dan usmjerene vožnje, a drugi dan može biti "U redu, ovo je vaš cilj odakle god završite, pokušajte i idite na ovo mjesto".
To će povećati produktivnost!
Ken: Kada će se autonav pokrenuti?
Jim Erickson: Nešto poput dva do tri tjedna. Moramo prvo detaljno pregledati sve testove i validirati ih, da bismo se svi dobro osjećali s autonavima.
Ken: Kakav je Marsov teren na podu kratera Gale trenutno, i sljedećih nekoliko kilometara?
Jim Erickson: To je mješavina pijeska i različitih područja kamena vapnenaca. Kad uđemo u njega, morat ćemo biti u stanju udobno voziti na obje strane. Nema previše velikih stijena koji bi u ovom trenutku mogli biti problem. Neko je područje polica koje ćemo obilaziti.
Upravo je sada područje na kojem se nalazimo dobra stvar koja nam omogućuje vježbanje prepoznavanja prepreka i njihovo rješavanje. To će nam pomoći kasnije kada vidimo prepreke i želimo brže voziti.
Ken: Koji je sada ukupni plan, fokus na vožnju ili zaustavljanje i istraživanje?
Jim Erickson: - To nije namjera zaustaviti. Ovo će biti dobrih par tjedana vožnje.
U drugom dijelu mog razgovora s Jimom Ericksonom razmotrit ćemo više o roveru koji putuje vanzemaljskim teritorijem koji je istodobno znanstveni rudnik zlata i potencijalnu zamku smrti, kao i aktivnostima bušenja i uzorkovanja, opažanjem Comet ISON-a i nadolazećim znanstvenim ciljevima.
Prethodno iskustvo s roverima na Marsu bit će vam izuzetno korisno u proučavanju interakcije rovera sa poljima dine. Autonav je prvi put zaposlen na MER-ovim roverima.
Vozači rovera i znanstveni tim stekli su puno iskustva i znanja tijekom vožnje i Spirit and Opportunity kroz brojna gigantska polja dina vrlo različitog sastava i složenosti.
Pratite više informacija s Marsa.