Kombinirani tim američkih i kanadskih inženjera napravio je veliki prvi korak naprijed uspješno primjenjujući novo, prvovrsno istraživanje robotike provedeno na Međunarodnoj svemirskoj stanici (ISS) na eventualnom popravku i dopunjavanju svemirskih satelita velike vrijednosti u orbiti i koji ima potencijal jednog dana donijeti uštedu troškova u milijardama dolara za vladin i komercijalni prostor.
Sjajni istraživači iz oba naroda uzvikivali su "Da !!!" - nakon uspješnog korištenja eksperimenta robotske misije za dolijevanje goriva (RRM) - pričvršćen je izvan ISS-a - kao ispitni ležaj tehnologije kako bi se pokazalo da daljinski upravljani robot u vakuumu prostora može obaviti osjetljive radne zadatke koji zahtijevaju izuzetno preciznu kontrolu pokreta. Revolucionarni eksperiment s robotikom mogao bi produžiti radni vijek satelita koji su već na Zemljinoj orbiti i za koje se nikada nije namjeravalo raditi.
"Nakon što sam nekoliko mjeseci profesionalnog i osobnog vremena posvetio RRM-u, bio je to veliki emotivni nalet i uvjeravanje da vidim prvi video stream s RRM alata", rekao je Justin Cassidy u ekskluzivnom detaljnom intervjuu za Space Magazine. Cassidy je menadžer hardvera za RRM u NASA Goddard svemirskom letu u Greenbeltu u Marylandu.

A RRM tim već planira izvesti još ambicioznije praćenje eksperimenata počevši već ovog ljeta, uključujući i visoko očekivani prijenos tekućine za simulaciju stvarnog satelitskog punjenja goriva koje bi moglo transformirati aplikacije robotike u svemir - pogledajte detalje u nastavku!
Sve robotske operacije na postaji daljinski su kontrolirali kontrolori leta sa zemlje. Svrha daljinskog upravljanja i robotike je osloboditi ljudsku posadu ISS-a kako bi oni mogli raditi na drugim važnim aktivnostima i provoditi znanstvene eksperimente koji zahtijevaju ljudsku misao i intervenciju na licu mjesta.

Tijekom trodnevnog razdoblja od 7. do 9. ožujka, inženjeri su obavljali zajedničke operacije između NASA-inog pokusa robotske misije za dolijevanje goriva (RRM) i robotskog „majstora“ Kanadske svemirske agencije (CSA) - robota Dextre. Dextre je službeno nazvan SPDM ili specijalnim namjenskim spretnim manipulatorom.
Prvog dana robotski operateri na Zemlji daljinski su manevrirali Dextre „majstorom dugačkim 12 stopa“ (3 m) u eksperimentu RRM pomoću eksperimentalne robotske ruke (SSRMS) svemirske stanice.
Dextre-ova "ruka" - tehnički poznat kao "OTCM" - tada je uhvatio i pregledao tri različita specijalizirana satelitska radna alata smještena unutar RRM jedinice. Sveobuhvatnim mehaničkim i električnim procjenama alata za sigurnosnu kapicu, alata za rezanje žica i pokrivača i multifunkcijskog alata utvrđeno je da sva tri alata funkcioniraju savršeno.

"Naši timovi mehanički su učvrstili" ruku "kanadskog robota" Dextre "na Alat za sigurnosnu kapu RRM (SCT). RRM SCT prva je jedinica u orbiti koja je koristila video sposobnost ruku Dextre OTCM “, objasnio je Cassidy.
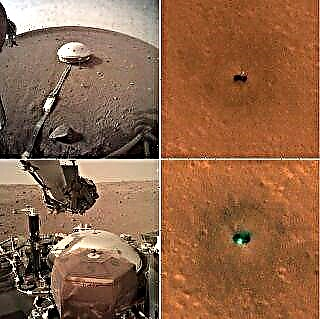
"Na početku rada s alatima, kontrolori misije mehanički su gurali električnu pupkovinu OTCM-a naprijed kako bi je povezali sa SCT-ovim integriranim elektroničkim okvirom. Kad je napajanje primijenjeno na to sučelje, naš tim je mogao vidjeti da na Goddardovim TV ekranima s velikim ekranom - SCT-ov prvi svjetlosni videozapis prikazuje snimak alata u ležištu za skladištenje RRM-a (vidi fotografiju).

"Naš tim izvikao je:" Aha! " pohvaliti ovu uspješnu naplatu električnog funkcionalnog sustava. "
Dextre je zatim izvršio različite zadatke čiji je cilj bio testirati koliko se različitim reprezentativnim plinskim spojnicama, ventilima, žicama i brtvama koje se nalaze na vanjskoj strani RRM modula može manipulirati. Oslobađaju se sigurnosne brave i pažljivo su presjekli dvije krajnje tanke satelitske žice za zaključavanje - izrađene od čelika - i promjera svega 20 tisuća u inč (0,5 milimetara).
"Događaj rezanja žica trajao je samo nekoliko minuta. No oba su rezanja žica trajala otprilike 6 sati koordiniranih, sigurnih robotskih operacija. Žica za zaključavanje bila je preusmjerena, uvijena i vezana na tlu na sučelju Ambient Cap i T-ventila prije leta ", rekao je Cassidy.
Ova vježba RRM predstavlja prvi put da je robot Dextre iskorišten za tehnološki istraživački i razvojni projekt na ISS-u, što je značajno proširilo njegove mogućnosti izvan robotskog održavanja masivnog orbita.
Videozapis: Dextre-ova robotska misija za dolijevanje goriva: 2. dan. Drugi dan najzahtjevnije misije Dextrea uspješno se završio 8. ožujka 2012. godine kada je robotski majstor izvršio svoja tri zadana zadatka. Zasluge: NASA / CSA

Ukupno su tri dana operacije trajala oko 43 sata i nastavili nešto brže nego što se očekivalo jer su bili onoliko nominalni koliko se moglo očekivati.
"Dani 1 i 2 trajali su oko 18 sati", rekao je Charles Bacon, voditelj / sustav inženjera za upravljanje RRM-om u NASA Goddard, za Space Magazine. „Dan 3 trajao je otprilike 7 sati otkad smo rano završili sve zadatke. Sva su tri dana provela 18 sati, a tim je radio u dvije smjene. Dakle, vrijeme je bilo očekivano, a zapravo malo bolje jer smo zadnji dan završili rano. "

"Posljednjih nekoliko mjeseci naš tim postavlja pozornicu za demonstracije RRM-a u orbiti", rekla mi je Cassidy. "Baš kao u kazališnoj produkciji, imamo puno inženjera iza scene koji su pružali podršku razvoju i nastavljaju biti dio operacija RRM-a u orbiti."
"U svakoj fazi RRM-a - od pripreme, isporuke, instaliranja i sada operacija - iznenadio sam se neizmjernim naporima koje su mnogi raznoliki timovi pridonijeli da se RRM dogodi. Ured za satelitske usluge u NASA-inom Goddard svemirskom letačkom centru udružio se s Johnson Space Centrom, Kennedy Space Center (KSC), Marshall Space Flight Centrom i Kanadskim svemirskim agencijskim centrom u St. Hubertu, Quebec, kako bi RRM postao stvarnost. "
"Dosadašnji uspjeh operacija RRM-a na Međunarodnoj svemirskoj stanici (ISS) pomoću Dextre-a svjedoči o izvrsnosti NASA-inih mnogih organizacija i partnera", objasnio je Cassidy.
Trodnevni "zadatak uklanjanja plinskih instalacija" bio je početna simulacija vježbanja tehnika bitnih za robotsko popravljanje neispravnih satelita i dopunjavanje inače operativnih satelita kako bi se produžio životni vijek na nekoliko godina.
Prizemni tehničari koriste armature i ventile za učitavanje svih esencijalnih tekućina, plinova i goriva u spremnike za skladištenje satelita prije pokretanja, a koji se zatim zapečaćuju, pokrivaju i obično im se više nikada ne pristupa.
"Utjecaj svemirske stanice kao korisnog testnog ležaja ne može se precijeniti", kaže Frank Cepollina, suradnik direktora Službe za sposobnost satelitskog servisa (SSCO) u NASA-inom Goddard svemirskom letu u Greenbeltu, Md.
„Svježe tehnologije za satelitsko servisiranje bit će demonstrirane u stvarnom svemirskom okruženju za nekoliko mjeseci umjesto godina. Ovo je ogromno. Predstavlja stvarni napredak u napretku svemirske tehnologije. "
Još četiri nadolazeća RRM eksperimenta, postavljena za ovu godinu, pokazat će sposobnost daljinskog upravljača da uklanja zapreke i puni prazne satelitske rezervoare za plin u prostoru, štedeći tako skupi hardver od prevremenog spajanja s orbitalnom vezom.
Vremena budućih operacija RRM mogu biti izazovna i ovise o dostupnosti Dextre-a i SSRMS kraka koji su također rezervirani za mnoge druge tekuće operacije ISS-a, kao što su plovidbe, aktivnosti održavanja i znanstveni eksperimenti, kao i vezanje i / ili istovar neprekidnog rada. niz kritičnih brodova za dopremu tereta kao što su Progress, ATV, HTV, Zmaj i Cygnus.
Fleksibilnost je ključna za sve operacije na ISS-u. Iako stanica postaje nije uključena u RRM, njihove aktivnosti bi mogle biti.
"Iako se posada sama ne oslanja na Dextre za svoje operacije, Dextre operative posredno mogu utjecati na to što posada može ili ne može", rekao mi je Bacon. "Na primjer, tijekom naših RRM operacija posada ne može izvoditi određene fizičke vježbe zbog toga kako bi to kretanje moglo utjecati na kretanje Dextrea."
Ovdje je popis predstojećih operacija RRM - čekanja na rasporedu ISS-ovog rasporeda:
* Dolivanje goriva (ljeto 2012.) - Nakon što Dextre otvori ventil za gorivo sličan onome koji se danas obično koristi na satelitima, on će kroz njega prenijeti tekući etanol kroz sofisticirano robotsko crijevo za dolijevanje goriva.
* Manipulacija termičkim pokrivačem (TBD 2012) - Dextre će prakticirati odsecanje termalne pokrivače i preklopiti termalni pokrivač kako bi otkrio sadržaj ispod.
* Uklanjanje vijka (pričvršćivač) (TBD 2012) - Dextre će robotski odvrnuti satelitske vijke (pričvršćivače).
* Električno uklanjanje poklopca (TBD 2012) - Dextre će ukloniti kapice koje bi obično pokrivale električnu utičnicu satelita.
RRM je prebačen u orbitu unutar teretnog prostora Space Shuttle Atlantis tijekom srpnja 2011., na završnoj misiji shuttlea (STS-135), NASA-inog programa prijevoza od deset godina, a zatim je postavljen na vanjsku radnu platformu na ISS-ovoj potpornoj plovidbi pomoću svemirskih astronauta. Projekt je zajednički napor NASA-e i CSA-e.
"Ovo je zapravo uspjeh. Pomoću RRM-a istinski smo utrli put budućem robotskom istraživanju i servisu satelita “, zaključio je Cassidy.

…….
24. ožujka (sub): Besplatno predavanje Kena Kremera u New Jersey Astronomical Association, Voorhees State Park, NJ u 2030 sati. Tema: Atlantis, program shuttlea za kraj Amerike, RRM, Orion, SpaceX, CST-100 i budućnost NASA-inog ljudskog i robotskog svemirskog leta